CS-7638 | Robotics: AI Techniques (RAIT) | Spring 2022

Choosing my first graduate school course at Georgia Tech required time and considerable research. With so many subject matters and difficulty levels to choose from, I had to conduct extensive research to pick the right one, as this first impression would set the tone for the rest of my graduate education. Another factor that I had to take into account was Georgia Tech’s policy that requires two B’s or higher in two courses the first year to maintain enrollment. After many hours cycling through reddit, google, and OMSCentral (a student run course ranking board website), I decided on taking CS-7638 - Robotics: AI Techniques (RAIT), an average difficulty course with great reviews.
Syllabus
The course teaches different artificial intelligence algorithms that are commonly used in robotic systems such as self driving cars, or robotic vacuums. The lessons are structured to teach us how to program all the major systems of a robotic car based on lectures from the former leader of Google and Stanford’s autonomous driving team, Dr. Sebastian Thrun. The course itself is instructed by Georgia Tech’s Dr. Jay Summet and various TA’s.
Learning Objectives
The objectives for this course were:
Implement filters (Kalman and Particle filters) in order to localize moving objects whose locations are subject to noise.
Implement search algorithms (including A*, Dynamic programming) to plan the shortest path from one point to another subject to costs on different types of movement.
Implement PID controls to smoothly correct an autonomous robot’s course.
Implement a SLAM algorithm for a robot moving in at least two dimensions.
These objectives were met through Problem Sets, Projects, and Exams. Programming in this course was done in Python 3. Math used in this course was primarily probability and linear algebra.
Projects
The largest bulk of information learned and what accounted for 60% of our course grade were projects. Projects contained some starter code and a doc sheet with requirements that our program had to follow. The goal for each project was to implement filters and algorithms we had learned from lectures using Python. Although time consuming, completing these projects solidified robotics AI techniques and was thoroughly fulfilling.
Project 1: Kalman Filter
In the first project, we were tasked to implement a Kalman Filter to estimate locations of incoming meteorites, and to navigate a turret towards the moving meteorites to destroy them. The course provided the working environment, with test cases that included a random set of incoming meteorites.
Kalman Filter is an algorithm used to estimate system parameters, even ones that are not observed. In our project, we used Kalman Filter to take in a noisy measurement input to estimate the future state and velocity of a meteorite.

Image from: https://thecustomizewindows.com/2019/03/kalman-filter-to-stabilize-sensor-readings/
Above are the general steps used in a Kalman Filter. In summary, the Kalman Filter works in two phases, the Prediction Phase and the Measurement Phase. In the prediction phase, the Kalman Filter produces estimates of the current state variable using the initial or previous state. In the Measurement, or update phase, new sensor measurement inputs are used along with our new predicted state in a calculation to predict the updated state. The average is weighted using a calculated Kalman Gain to determine which value (measurement, or predicted) we trust in more. The new updated predicted state is then fed back into the filter as the previous state until we get closer and closer to the actual state.
Having estimated the meteorite’s state of location and velocity using a Kalman filter, I was then able to use knowledge of our grid world, the predicted state, and trigonometry to guide our turret towards the meteorite to destroy it.
Project 2: Particle Filters

In this project we implementing a particle filter to estimate locations of planets in a solar system. We populated the grid world with N number of particles, assigned each a weight based on the particle’s gravitational reading from our sensor compared with the planet’s gravitational reading, and resampled our population with particles of higher weight being chosen more frequently. Particles with similar sensor readings to our planets are assigned a higher weight. This algorithm is survival of the fittest, where measurements that are far from actual are more likely to be removed from the population through resampling.
Project 3: PID Control
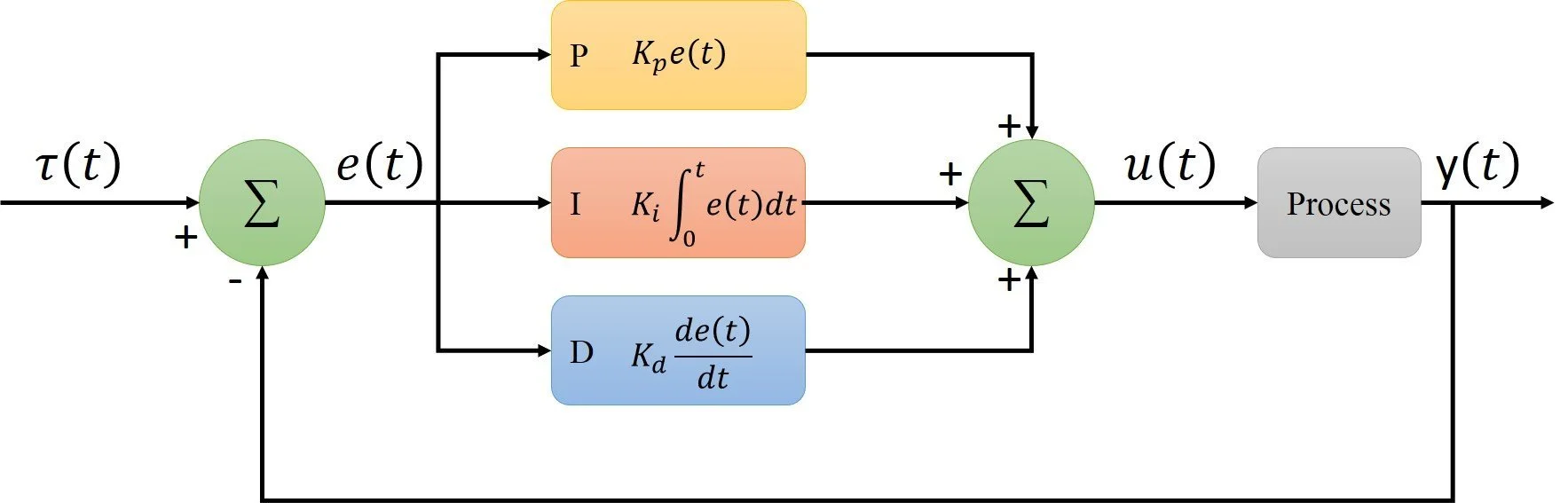
For this project, we implemented a PID controller to control a flying drone’s hovering altitude and location. Given a goal altitude and location, we needed to control the drone’s RPM to hover at the target location and altitude for a specific time limit. We implemented P, proportional control to reduce our error (in this case difference in position from goal) by controlling the drone’s propeller RPM in proportion to distance away from goal. This parameter needed to be tuned until we were getting our drone close to our goal.

This resulted in our drone oscillating around the target altitude, where the drone would approach the target altitude, but overshoot it, then correct itself. To account for this, we needed to incorporate the derivative of the error in our calculation. The derivative produces an output based on the rate of change of the error. This means as the drone approaches the goal altitude, the value of the derivative approaches 0, smoothing down the approach towards goal, which prevents oscillation and overshooting. To account for system errors, an integral of the error is added to the calculation. The integral control will continuously increment or decrement the controller’s output to reduce the error to 0.
The PID controller was simple to implement. The greatest challenge was fine tuning each parameter to minimize error. This could be done manually, or using a Twiddle Algorithm.
Project 4: Warehouse Search
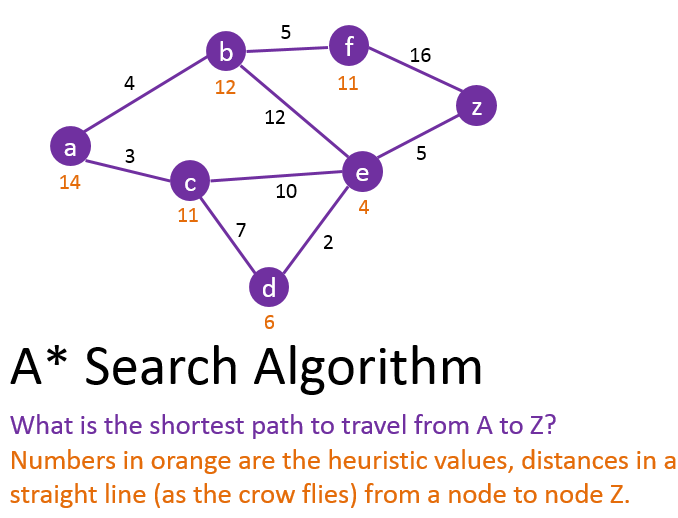
The fourth project involved controlling a robot around a warehouse to retrieve and drop off packages. We were to implement search algorithms, mainly A* Star and Dynamic Programming for stochastic cases where the starting position is unknown. The warehouse world is a discrete grid, with each position having varying costs. We had to find the most efficient path to the package, and to the drop zone.
A* search algorithms uses a known starting position and expands outwards and checks whether neighboring spaces are the goal, all while keeping track of accumulating costs. A* Search algorithms also use a heuristic function as a map to guide its decision.
Dynamic programing accounts for the stochastic nature of the world by calculating optimum paths to the goal from any starting position. Implementation of Dynamic programming to find the optimum path from any position to a goal has the same structure as A*star, with some extra accounting steps for a value grid that is used to count backwards from the goal to calculate the cost of reaching the goal from any position. These costs are then used to assign the action that the robot needs to take.
Project 5: SLAM (Synchronous Localization and Mapping)
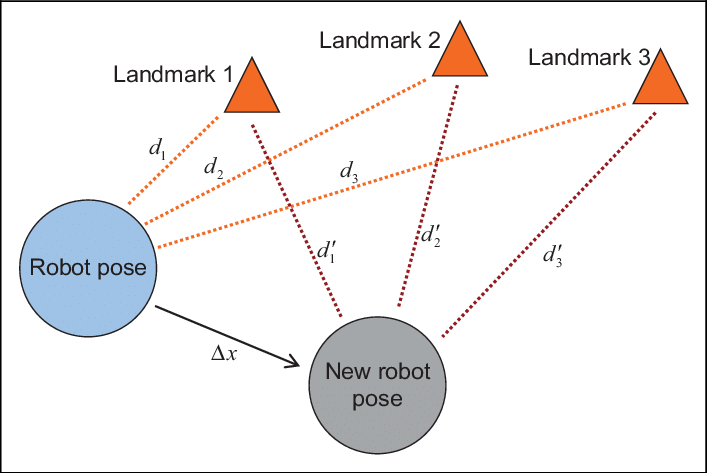
In project 5, we had to localize our drone while navigating the drone to a known treasure position. With an unknown map, we could not localize using traditional filters or methods. We implemented an online SLAM (synchronous localization and mapping) algorithm to localize our robot while mapping out positions of landmarks in our map. We use sensors of landmark positions and movements to update our state matrix with the location of our drone and of the landmarks. We do this by considering the measurement and movement constraints and doing simple matrix multiplication.
Conclusion
CS-7638, Robotics: AI Techniques (RAIT) was a great first impression into the program. I highly enjoyed the course topics, the way it was presented, and the support received from my colleagues and TA’s. At times, the projects seemed impossibly challenging, but the process of overcoming unknowns through days of research and debugging reinforced my learning of the implementation of the algorithms and was fulfilling. Aside from learning algorithms and python, It was a good learning experience for managing and allocating my time between grad school, a full-time job, and family and friends.